לדגמי V50 ו־Z60 אין שום בעיה להתמודד עם מדרגת הממ״ד – הם יודעים לטפס עליה בלי קושי.
לעומת זאת, דגם P50 מסוגל לעבור סף של עד 22 מ״מ, ולכן בממ״ד שבו המדרגה קרובה לגובה הזה זה כבר גבולי, ועלול לגרום לו להיתקע או להימנע מהמעבר.

הדגם V50 יכול להעלות מקסימום 6 ס”מ לסף דו-שכבתי, כ-4.2 ס”מ לסף שכבה אחת הם עוברים סף עד 6 ס”מ.
גובה המדרגות המשולבות הוא 4.0 ס”מ + 2.0 ס”מ, אם יש מדרגה אחת גבוהה יותר מ-4.0 ס”מ, הרובוט לא יצליח להתגבר על המכשול.
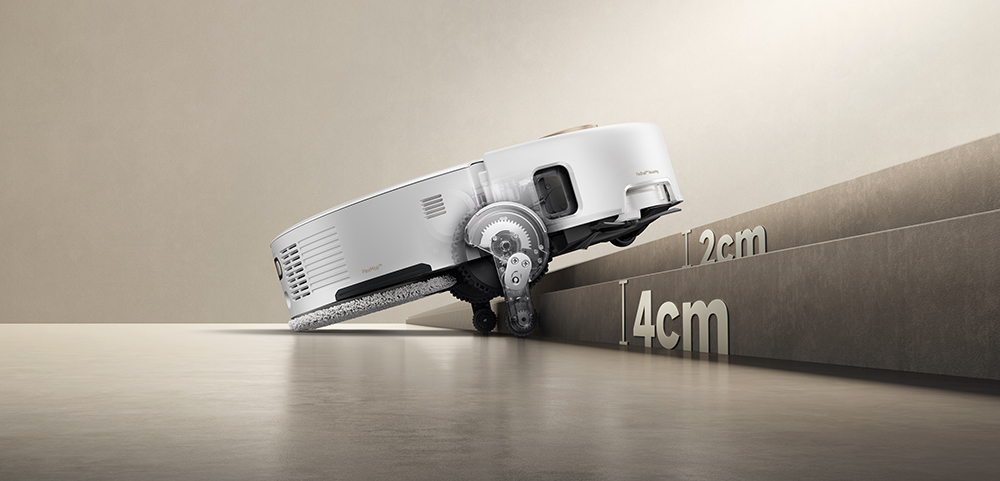
הדגם Z60 יכול להעלות מקסימום 8 ס”מ לסף דו-שכבתי כפי שמוצג בתמונה, כ-4.8 ס”מ לסף שכבה אחת.
גובה המדרגות המשולבות הוא 4.5 ס”מ + 3.5 ס”מ, אם יש מדרגה אחת גבוהה יותר מ-4.5 ס”מ, הרובוט לא יצליח להתגבר על המכשול.

מכשולים נמוכים
השואבים הרובוטיים מסוגלים לעיתים לטפס על מכשולים נמוכים יחסית, אבל דווקא בגלל שהמכשול קטן ואין לשואב “קונטרה” או תמיכה מאחור והוא עלול להיתקע. כלומר החלק הקדמי מצליח לעלות, אבל החלק האחורי נשאר תלוי באוויר או נתקע בנקודה שמונעת ממנו להמשיך קדימה או לחזור אחורה.
למרות שהרובוט מסוגל לפעמים לעלות על המכשול ואף לעבור אותו, זה לא מומלץ, השואב הרובוטי עלול להיפגע לאורך זמן או להיתקע בתנוחות שמפעילות עליו עומס מיותר. במצב כזה מומלץ להגדיר במפה של האפליקציה אזור אסור (No-Go Zone), כך שהרובוט ידלג על המקום הבעייתי ולא ינסה לטפס עליו כלל.

הגדרת רגלי מרווח
אתחיל קודם עם הדגמים שמסוגלים לעבור מכשולים בקלות: בדגמים המתקדמים כמו V50 ו־Z60 קיים בתפריט ההגדרות מסך בשם “הגדרת רגלי מרווח”. זהו מנגנון ייעודי שמאפשר לשואב להגביה את עצמו בזמן חציית מכשולים, וכך לעבור מדרגות קטנות ומפגעי גובה בצורה חלקה ובטוחה.
⚙️ על מנת להגדיר את סוג חציית המכשולים יש לעבור למסך ההגדרות -> הגדרות רגלי מרווח -> לבחור את הסוג המתאים לכם.

במידה שהשואב לא מצליח לעלות לחדר ומדלג עליו, מומלץ להגדיר באפליקציה סף שניתן למעבר. ההגדרה הזו מסייעת לשואב להבין שקיים שם מכשול (מדרגה) שהוא אמור לנסות לטפס עליו, ולא להתייחס אליו כאל אזור חסום. כך השואב ינסה שוב לגשת למעבר במקום לדלג עליו.
הגדרת סף וירטואלי
1️⃣ לחצו על כפתור: ![]() עריכת המפה ובחרו באפשרות: “סף וירטואלי/רמפה“.
עריכת המפה ובחרו באפשרות: “סף וירטואלי/רמפה“.
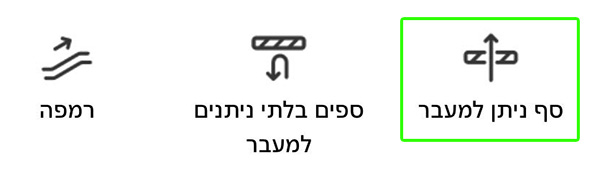
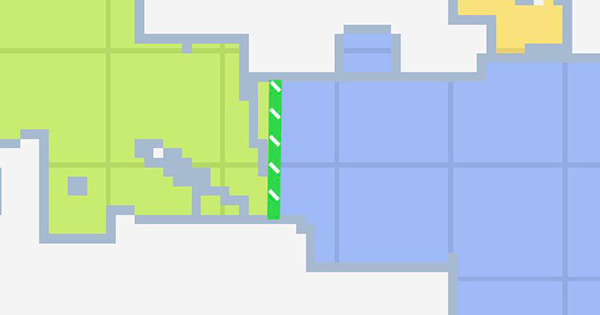
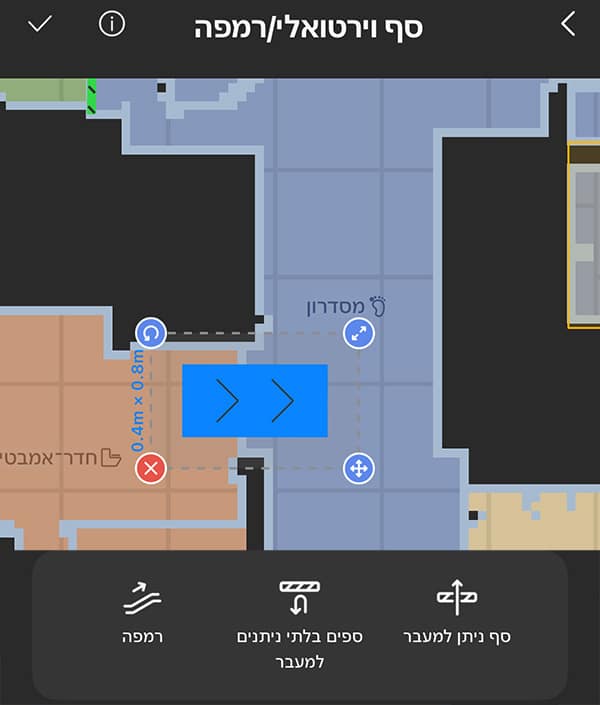
2️⃣ יש לבחור באפשרות “סף ניתן למעבר” ולסמן במפה את המדרגה בכניסה לממ”ד, כפי שבתמונה הבאה:
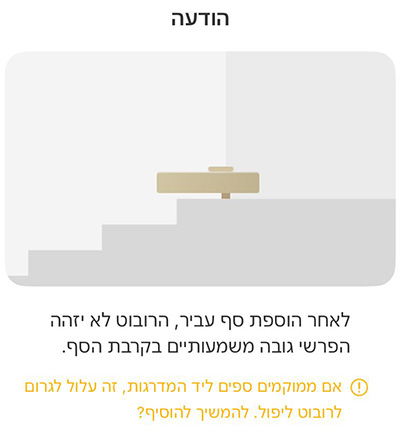
חשוב לציין שאפשרות זו מסירה את הגנת הסף מה שאומר שאם זה בית עם קומות אין להשתמש באפשרות זו כי הוא יכול ליפול!
🪜 מה עושים שלמרות הגדרת הסף הוירטואלי הוא עדיין לא מצליח לעלות מעל המדרגה? במקרה כזה יש לרכוש ולשים רמפה פיזית בכניסה לממ”ד.
התקנה והגדרת רמפה
בדגמי שואבים רובוטיים שאין להם מנגנון מכני להרמה לגובה, אין לשואב אפשרות אמיתית לטפס על מדרגות או מפלס בתוך הבית. המשמעות היא שהוא ידלג לחלוטין על חדר שנמצא מאחורי מדרגה – כמו חדר ממ״ד.
במקרים כאלה ניתן לרכוש רמפה ייעודית בגודל המתאים למדרגת הממ״ד, להציב אותה בכניסה לחדר, ולאחר ההתקנה להגדיר באפליקציה את מיקום הרמפה על המפה. כך השואב יזהה את האזור כמעבר תקין ויוכל להיכנס לחדר ולנקות אותו ללא בעיה.

חשוב לציין שהסימון במפה לרמפה היא רק במידה ויש לכם רמפה אמיתית מותקנת בכניסה לחדר הממ”ד.
לאחר התקנת פיזית של הרמפה, יש להגדיר אותה במקום הנכון במפה באפליקציה דרך עריכת המפה סף וירטואלי (תקראו איך בהמשך למדריך זה).

איפה קונים רמפה?
📐 יש לרכוש רמפה עם זווית הרמפה שלא תעלה על 12 מעלות.
📏 בחרו את הגודל המתאים לכם לפי מדידה של מדרגת הממ”ד.
אין לי מקום מיוחד ובחיפוש בגוגל מצאתי את הקישורים הבאים:
- רמפת סף לדלת ביתית Temu
- רמפת סף לדלת ביתית Temu
- רמפה לדלת עם סף אנטי-החלקה aliexpress
- רמפת סף גומי Amazon

לאחר ששמתם את הרמפה בכניסה לחדר הרצוי, יש להגדיר את מיקום הרמפה לשואב הרובוטי ונעשה את זה ע”י עריכת המפה של הבית שלכם.
עריכת מפה
1️⃣ לחצו על כפתור: ![]() עריכת המפה.
עריכת המפה.
2️⃣ בחרו באפשרות: “סף וירטואלי/רמפה“.
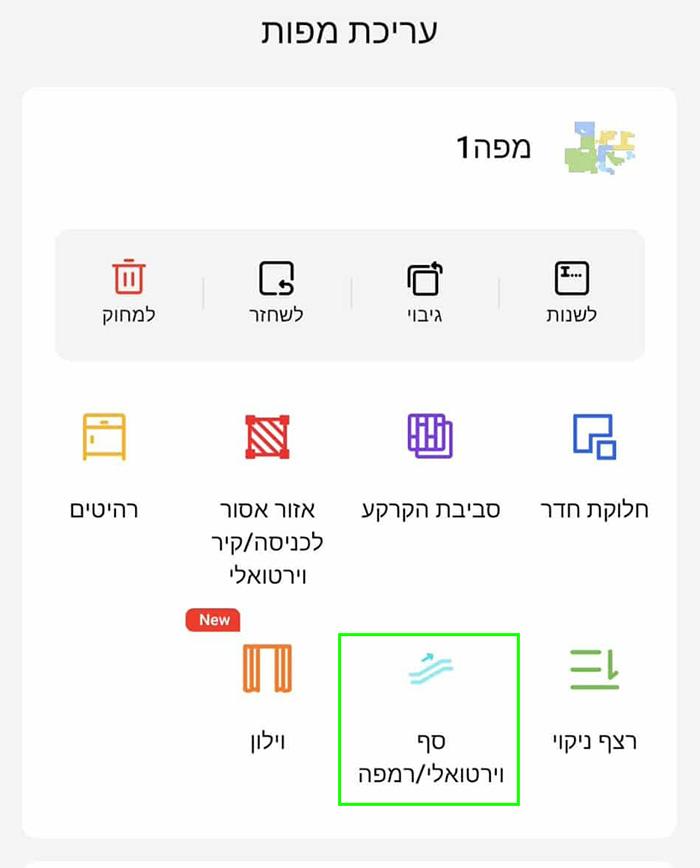
3️⃣ בחרו באפשרות המתאימה לכם, במקרה שזה מדרגת ממ”ד תבחרו באפשרות: “רמפה“.

4️⃣ יש להתקין את הרמפה בכניסה של החדר ואז לסמן רמפה במפה.

שימו לב – יש לסמן את הרמפה בכיוון הנכון!
5️⃣ בסיום יש לשמור את המפה תשמרו את המפה ✔️




{kind=link}
{kind=link}