הרובוט מצויד בחיישנים ובאלגוריתם ייעודי לחישוב גובה. לפני כל כניסה לאזור נמוך, הוא מבצע מדידה כדי לקבוע אם יוכל להיכנס ולצאת בבטחה. במידה שהמקום עמוק מדי (לדוגמה מתחת למיטה או ספה) והוא עלול להיתקע, להישרט או להינזק, הרובוט יזהה את הסיכון, ידלג על האזור וימשיך בפעולת הניקוי בשאר הבית. ניתן לבטל את המגבלה ולהגדיר לו להיכנס בכוח אבל יהיה עליכם להחליט אם תרצו שהוא יכנס לדוגמה מתחת למיטה שהיא נמוכה מדי ולקחת את הסיכון שהוא יתקע והיפגע.

הדגם V50 יכול להיכנס למקומות בגובה נמוך של 89.5 מ”מ, והדגם Z60 יכול להיכנס למקומות בגובה נמוך של 96 מ”מ.
עדכון תוכנה
לפני הכל, יש לוודא שאין עדכון תוכנה לרובוט ולאפליקציה בטלפון שלכם. אם יש תעדכנו.
ראש חכם
השואבים המתקדמים של MOVA מגיעים עם ראש LDS מתכונן שיודע לרדת כשהשואב מגיע למקום נמוך כמו ספה, מיטה וכדו’.
הפעולה בדגמים שהראש עולה ויורד (לדוגמה בדגמים: V50, Z60) היא אוטומטית.
בעת זיהוי אזורים נמוכים כמו מתחת לספה, חיישן הניווט (DtoF) נסוג ומאפשר עבירות טובה יותר ובמרחבים פתוחים, הוא מתרומם להגברת שדה הראייה, מה שמבטיח ניווט מדויק ותכנון מסלול חכם.

אסור בשום אופן ללחוץ או לגעת בראש!
החיישן יושב בחלק העליון של השואב, נראה כמו מין “כיפה”, ותפקידו לשגר קרני לייזר ולמדוד את ההחזר שלהן. כך הוא יכול למפות את החדר בזמן אמת, לזהות קירות, רהיטים ומכשולים, ולבנות מפה דיגיטלית מדויקת של הסביבה.

בזכות הראש LDS השואב לא “נוסע בעיניים עצומות”, אלא מתכנן מסלול חכם שמכסה את כל השטח, בלי לפספס אזורים ובלי לחזור עליהם יותר מדי. זה גם מה שמאפשר לו להתמצא היטב בין חדרים שונים, לחזור לעמדת הטעינה באופן מדויק, ולשמור “זיכרון” של המפות.

מה זה ראש DToF / LDS?
הראש LDS (ראש לייזר, או Laser Distance Sensor) הוא רכיב מרכזי בשואבים רובוטיים שתפקידו לסרוק את הסביבה.
בשואבים של Mova יש חיישן DToF מתקדם יותר לדיוק גבוה ולטווח ארוך – חיישן ניווט Direct Time of Flight ובקיצור DToF הוא חיישן מבוסס לייזר למדידת מרחק שעובד ע”י שיגור קרני לייזר עדינות וחסרות נזק, וקליטה חוזרת של ההחזר שלהן. לפי הזמן שלוקח לקרן לחזור, המערכת יודעת לחשב מרחקים בדיוק גבוה.

חיישן הניווט הוא למעשה “העיניים” של השואב הרובוטי, והוא זה שמאפשר לו לעבוד בצורה חכמה, יעילה ומדויקת הרבה יותר לעומת שואבים שמבוססים רק על חיישני מגע או מצלמה בלבד.
1️⃣ הגדרות באפליקציה
⚙️ יש לעבור להגדרות -> הגדרות ניקוי רצפות -> עם הרמה אוטומטית LDS.

ניתן לשחק עם 3 הרמות ולבחור את המתאים ביותר לבית שלכם.
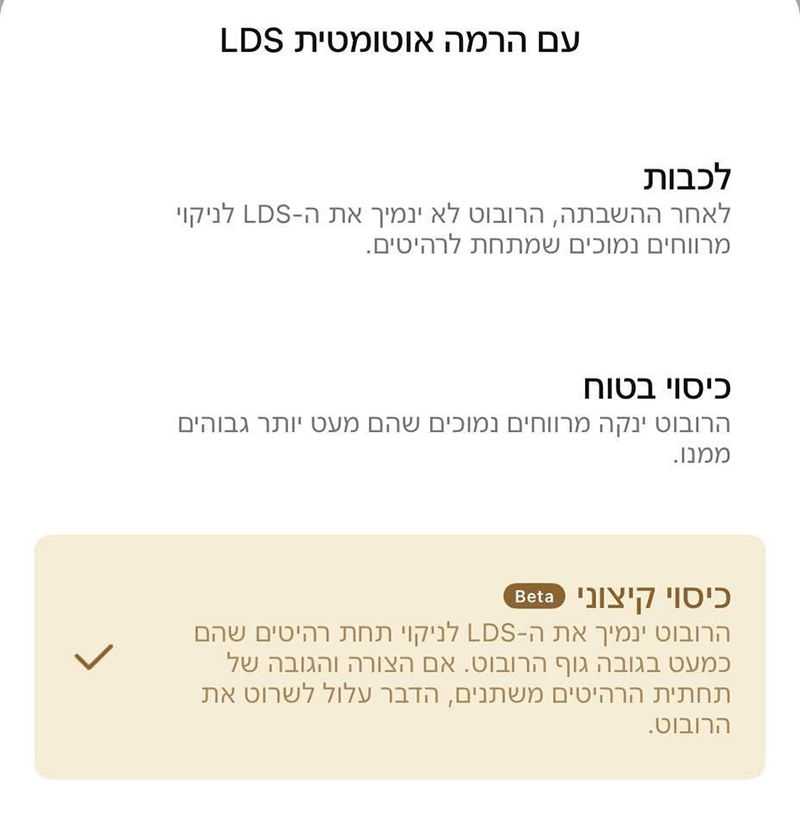
זו הגדרה שכדאי להתעכב עליה – ישנם מקרים שבהם סימון של “כיסוי בטוח” בלבד אינו מספיק, ונדרש מהשואב מאמץ ודיוק גבוהים יותר, במיוחד באזורים עם פאנל צוקל נמוך במיוחד או מרווחים גבוליים. התאמה נכונה של ההגדרה תאפשר ניקיון יסודי יותר במקומות מאתגרים.

במקרה שהשואב לא מצליח להגיע לאזור הנמוך והצמוד ולנקות אותו אז מומלץ לבחור את האפשרות: “כיסוי קיצוני” בהגדרות הרמה אוטומטית LDS.
⚠ לאחר הפעלת האפשרות “כיסוי קיצוני”, הרובוט ינקה גם מתחת לרהיטים שגובהם קרוב לגובה הרובוט. במקרים כאלה קיימת אפשרות למגע צמוד עם תחתית הרהיט, פעולה שעלולה לגרום לשריטות או לפגיעה חיצונית ברובוט. לכן, לפני ההפעלה מומלץ לוודא שתחתית הרהיטים והקצוות שלהם ישרים, חלקים וללא בליטות או ברגים בולטים, על מנת למנוע נזק לשואב הרובוטי במהלך פעולת הניקיון.
2️⃣ הגדרת איזור נמוך
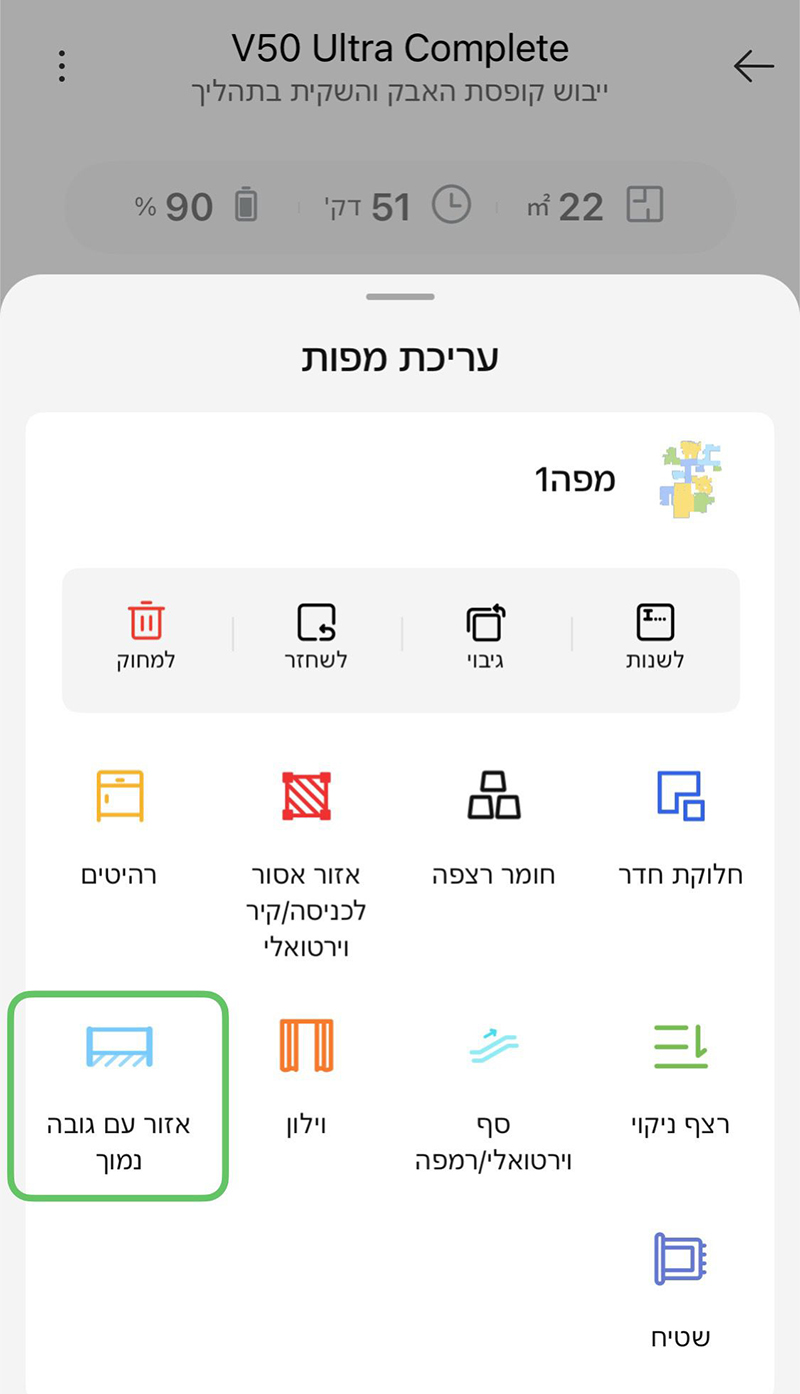
אפשרות נוספת היא להגדיר לשואב את האיזור הנמוך הרצוי והוא יכוון את עצמו כשיגיע לנקודה המסומנת. נבצע את זה ע”י עריכת המפה:
⚙️ תוכלו לעשות את זה דרך עריכת מפות -> אזור עם גובה נמוך.
ארונות עם צוקל נמוך
במקרים שבהם השואב הרובוטי מתקשה להיצמד לארונות המטבח בשל צוקל נמוך, ניתן לסייע לו באמצעות סימון האזור כ-“אזור עם גובה נמוך”. הגדרה זו תנחה את השואב להתנהל בזהירות ובזווית המתאימה שתאפשר לו להגיע קרוב ככל האפשר מבלי להיתקע.
חשוב מאוד: לפני ההגדרת “אזור עם גובה נמוך” במפה, יש לוודא שהשואב הרובוטי אכן מסוגל לעבור לאורך כל תחתית הרהיט בחופשיות. בדיקה זו הכרחית כדי למנוע מצב שבו השואב ייתקע או יישרט מחלקים נמוכים מדי.
דוגמה לסימון של אזור נמוך מסביב לארון עם הצוקל הנמוך:

📖 רוצים ללמוד איך לערוך את המפה ולהוסיף איזור נמוך מיוחד? כנסו למדריך עריכת המפה.
זהו, עכשיו רק נשאר לבצע ניקיון והשואב יעשה את הנמכת הראש כמו שאתם רוצים ואיפה שאתם רוצים.






{kind=link}